浙江大学高分子科学与工程学系高超教授团队经过多年研究,于近期取得突破性进展。团队设计制备出高度可拉伸的全碳气凝胶弹性体,同时具有超低密度(5.7 mg cm-3)、高拉伸比(~200%)、低能量损耗(~0.1,低于硅橡胶)、优异抗疲劳性能(106循环)、宽温度适用范围(-198~500℃)等优异性能。

图1. 高可拉伸全碳气凝胶弹性体
团队提出了多级协同组装方法来实现这种高可拉伸全碳气凝胶。它具有四级结构,从宏观到微观分别是第一级的桁架结构(truss structure),第二级的多边形单元(polygon cells),第三级的屈曲支柱(buckled struts)和第四级的二元协同分子单元(binary molecular blocks)(如图2所示)。其中,第一级的衍架结构由石墨烯3D打印技术进行可控制备,得到具有不同图案的周期结构,实现不同的变形方式;第二级的多边形单元是石墨烯气凝胶材料的基本组成单元;第三级的屈曲结构是通过受限还原过程得到,它可以通过不同的压缩率来调节;第四级结构是由石墨烯和碳纳米管的协同组装构成的,该协同作用可以有效增强气凝胶结构单元壁,提高气凝胶弹性体的弹性模量和抗疲劳性能。

图2. 高可拉伸全碳气凝胶弹性体由多级协同组装方法制得
这种全碳气凝胶弹性体具有优异的抗疲劳性能,在拉伸200%的状态下,可稳定循环至少100圈;在100Hz, 1%应变的状态下,可稳定循环至少百万次。
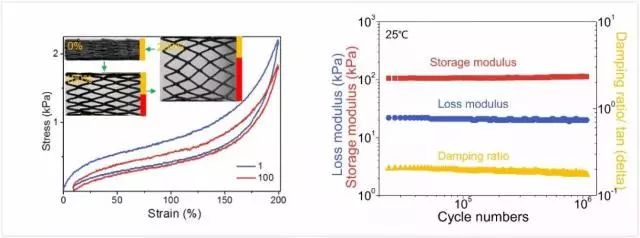
图3. 全碳气凝胶弹性体的抗疲劳性能
这种全新的超轻碳基弹性体组装成应变传感器,可以对复杂的形状变化进行逻辑识别。该传感器首先应用在蛇形机械手臂上,可以准确识别出线型、新月型、S和反S型等形状及其变化。
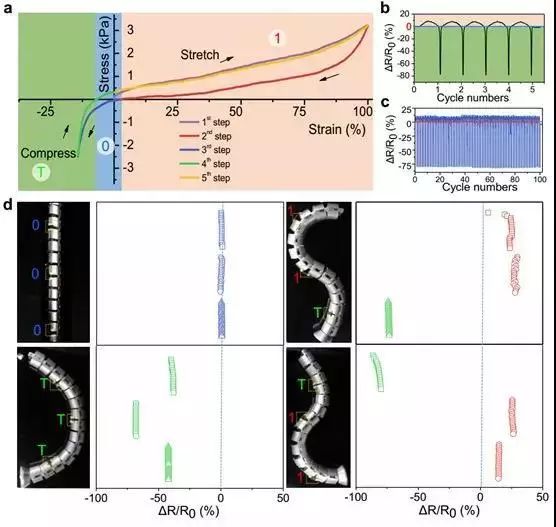
图4. 全碳气凝胶弹性体组装成可以进行逻辑识别的应变传感器
该篇工作首次制备得到高度可拉伸的无机全碳气凝胶弹性体,将弹性体的概念拓宽到了无机领域,并改善了弹性体的高低温耐老化性能,拓宽了使用温度范围,为其在柔性器件、智能机器人及航空航天领域的应用奠定了理论基础。同时,这种多级协同组装的方法也为其他无机弹性体的制备提供了一条全新的设计思路。
高超团队与浙江大学航空航天学院的王宏涛、赵沛教授合作,进行了拉伸试验的原位高分辨透射原位表征,为揭示弹性机理提供了直接的微观实验证据。
论文发表于期刊 Nature Communications, 共同第一作者为博士生郭凡、姜炎秋,通讯作者为许震研究员、高超教授。

本站所有信息与内容,版权归原作者所有。网站中部分新闻、文章来源于网络或会员供稿,如读者对作品版权有疑议,请及时与我们联系,电话:025-85303363 QQ:2402955403。文章仅代表作者本人的观点,与本网站立场无关。转载本站的内容,请务必注明"来源:林中祥胶粘剂技术信息网(www.adhesive-lin.com)".
©2015 南京爱德福信息科技有限公司 苏ICP备10201337 | 技术支持:南京联众网络科技有限公司
 加载中...
加载中...